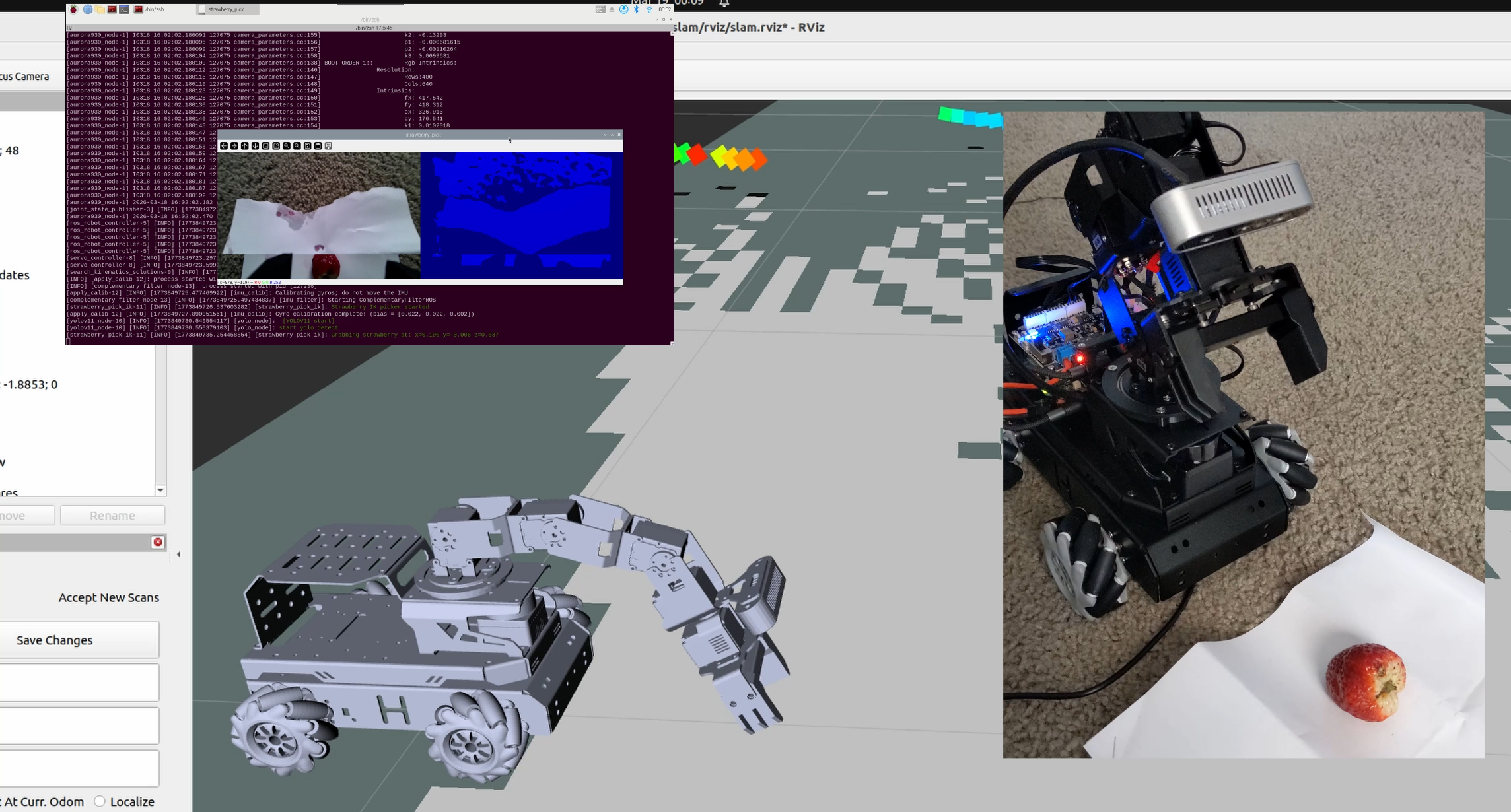
Autonomous Strawberry Picking Using a ROS2 Mobile Manipulator and YOLOv11-Based Depth-Aware Grasping
A complete guide to training a custom YOLOv11 model, converting it to OpenVINO format, and deploying it on a LanderPi robot for autonomous strawberry detection and picking using a depth camera and inverse kinematics.
The Script That Helped Me Win 3MT Thesis Competition
This is a walkthrough that will try to help you prepare a script for a 3MT Thesis competition. Read it thoroughly and customize it as per your work that you may be involved with. I hope this helps!

The Future of Precision Agriculture